


四元數數控
NEWS
全國服務熱線
15818624218
15818624218

深圳市四元數數控技術有限公司
手機: 15818624218
郵箱:liusyscnc@qq.com
QQ:790708208
地址:深圳市光明區光明街道碧眼社區華強創意公園5棟A座19樓
郵箱:liusyscnc@qq.com
QQ:790708208
地址:深圳市光明區光明街道碧眼社區華強創意公園5棟A座19樓
 當前位置:
當前位置:機器人上下料視覺定位流程講解
產品詳情
先拍再抓和先抓再拍的區別
先拍再抓要簡單得多,拍照后,視覺給機器人糾偏位置,然后下去吸,這樣能保證每次取料位置一致。
放料的時候不用管,只用走一個固定的示教點即可。
先抓再拍則因為每次吸起電芯時,吸嘴在電池上的位置不同,電池相對吸嘴的角度也不同,因此在放料那邊需要做一些復雜運算才可以保證放料位置保證一致。
先拍再抓的流程
流程分為3個部分:
(1)首先取得模板電芯的特征點信息,示教載盤上放料位置點。
(2)CCD拍照,取得當前電芯特征點信息,計算當前特征與模板特征特征點的偏移值(XYU),讓機器人糾偏吸盤位置。
(3)機器人抓取電芯,到載盤的示教點上放料
實際拉帶上的來料,姿式各種各樣,如圖2所示,來料電芯帶角度且位置與模板電芯也不同。
CCD拍照后,仍然計算當前電芯的特征點,與之前模板的特征點計算出偏移后的XY。
取電芯的左邊線與水平軸的夾角,與之前模板的方向邊計算出偏移后的U。
這時候機器人糾偏,吸盤會移動XYU,保持與電芯左邊的相對位置。
然后機器人吸起電芯,走到放料的點位。
由于每次機器人取料的位置都相對于電芯的左邊位置固定不變,因此使得電芯放置到放料位的位置也會保持不變。
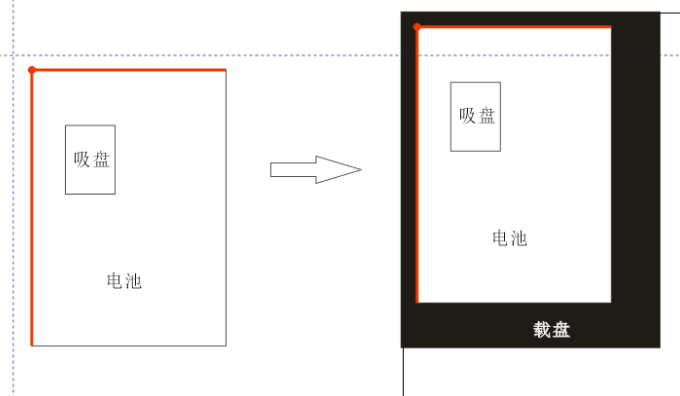
如圖1所示,放置一片模板電芯到CCD下面,視覺抓邊取頂邊與左邊及其交點。以交點做為模板的特征點,左邊做為模板的方向邊。
讓機器人示教一個抓取電芯的點,如圖1所示的這個示教點使得吸盤左邊平行于電芯左邊并且有一個固定距離。
讓機器人把電池吸起,示教一個點放置電芯到載盤上,電芯的邊按載盤所在工位的要求進行對齊。

(圖2)
不用模板實現ROI跟隨
思路是取得初始電芯的中心點到和方向信息,這樣即可以實現ROI跟隨。